

But it won’t be easy. For one thing, sophisticated as the technology is, the underwater environment is unforgiving.
“Lose one screw, and the Minnebot drowns,” says Sattar.
Minnesota waterways are stressed by invasive weeds like Eurasian watermilfoil, which changes water chemistry and hurts wildlife important to our economy. Other stressors include climate warming, a driver of algal growth and bane of trout and walleye; and spreading human habitation, which pollutes and disrupts the numerous small wetlands—“prairie potholes”—crucial for migrant waterfowl.
Threats to Minnesota waterways and wildlife
Eurasian watermilfoil

Algal growth

Climate warming

Spreading human habitation
“Particularly in Minnesota, we care about lakes and waterways,” says Corey Knutson, a doctoral student in Sattar’s lab. “Humans can’t clean up waterways by themselves. The point of robots is to do dull, dangerous jobs humans don’t want to do.


From lab to lake, the Minnebot is changing our ideas about underwater exploration.
Versatile vehicle
The Minnebot’s algorithms allow it to identify everything from mussels and moray eels to all manner of plastic debris. It’s already finding trash in Twin Cities lakes, as well as the ocean, Sattar says.
The Minnebot also has great potential in hazardous situations like searching shipwrecks or clearing lakes of invasive species. Sattar’s team can, for example, train robots to identify and locate weeds like milfoil.
“It can take the DNR many weeks to clear a lake,” Sattar notes. “Then multiply that by 10,000 lakes. It is dangerous because people have to work underwater for a prolonged period of time. We’d like robots to do this task by themselves. The Minnebot can detect milfoil and is learning to map it. It could identify it at deeper depths, before it’s a nuisance.”
Also, “We could ask the Minnebot to, for example, find an arsenic leak in a lake. Forty percent of wells built since 2008 have arsenic contamination.”
Even cold, clear Lake Superior harbors subsurface rivers of algae that bode ill for its continued health. The Minnebot’s sensors can help identify conditions like currents, temperatures, plant life, or wave velocities that may spur algal growth but could potentially be controlled.

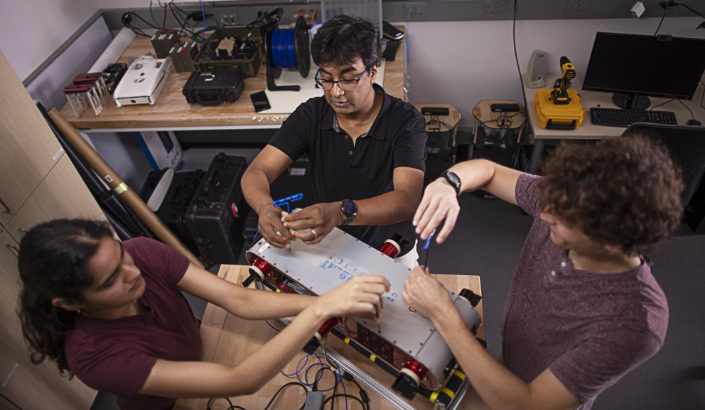
State of the art
The U of M Interactive Robotics and Vision Laboratory, which focuses on underwater robotics, is unique in the Midwest. To find others, you’d have to travel to coastal areas of the United States or to other continents.
The battery-operated Minnebot comes with three cameras for taking pictures at different angles, a gyroscope to identify its orientation, and a depth sensor. It can also be outfitted with a sonar device to detect objects, including rocks, fish, plants, shipwrecks—or bodies. It might even find a cell phone.
Though autonomous, it will often be guided by, and even converse with, a diver. It can “nod its head” and move its flippers or body to signal, for example, “turn right,” “follow me,” “object left,” “danger,” and “malfunction.” Sattar and his colleagues are improving algorithms to upgrade and refine its communication abilities.
“We’re trying to teach it to ‘speak human,’” he explains. “We’re experts in underwater human-robot interactions, one of the top teams in the world, as measured by research output. Diver-AI interaction is a growing field.”


Left: A diver brings the Minnebot back after an experiment. Right: LoCO, an AUV built by Sattar's team, detecting debris.
Wave of the future
The United Nations lists conservation and sustainable use of “Life Below Water” as the 14th global goal that will change our lives in the foreseeable future. One day, the Minnebot will play its part by allowing people to scan lakes, prairie potholes, or oceans.

“Someday,” Sattar says, “[we’ll be able to] pull up a lake map on a computer, tell it where to go in a lake, and get results in 10 to 15 minutes.”
The stakes couldn’t be higher. Sattar foresees a simple, grim consequence if Minnesota fails to adopt a technology like this:
“Water quality will go down the drain.”
Related Links
Share this story


